前言
手淘的插件化框架Atlas在ART上首次启动的时候,会通过禁用dex2oat来达到插件迅速启动的目的。之后后台进行dex2oat,下次启动如果dex2oat完成了则启用dex2oat,如果没有完成则继续禁用dex2oat。但是这部分代码淘宝并没有开源。且由于Atlas后续持续维护的可能性极低,加上Android 9.0上禁用失败及64位动态库在部分系统上禁用会发生crash,对于核心技术我们必须能掌握在自己手中。此文结合逆向与正向的角度来分析Atlas是通过什么手段达到禁用dex2oat的,以及如何自己实现代码达到禁用的目的。
逆向日志分析
由于手淘Atlas这部分代码是闭源的,因此我们无法正向分析其原理。所以我们可以从逆向的角度进行分析。逆向分析的关键一步就是懂得看控制台日志,从日志中入手进行分析。
通过在Android 5.0,Android 6.0,Android 7.0,Android 8.0 和 Android 9.0上运行插件化的App,我们发现,控制台会输出一部分关键性的日志。内容如下
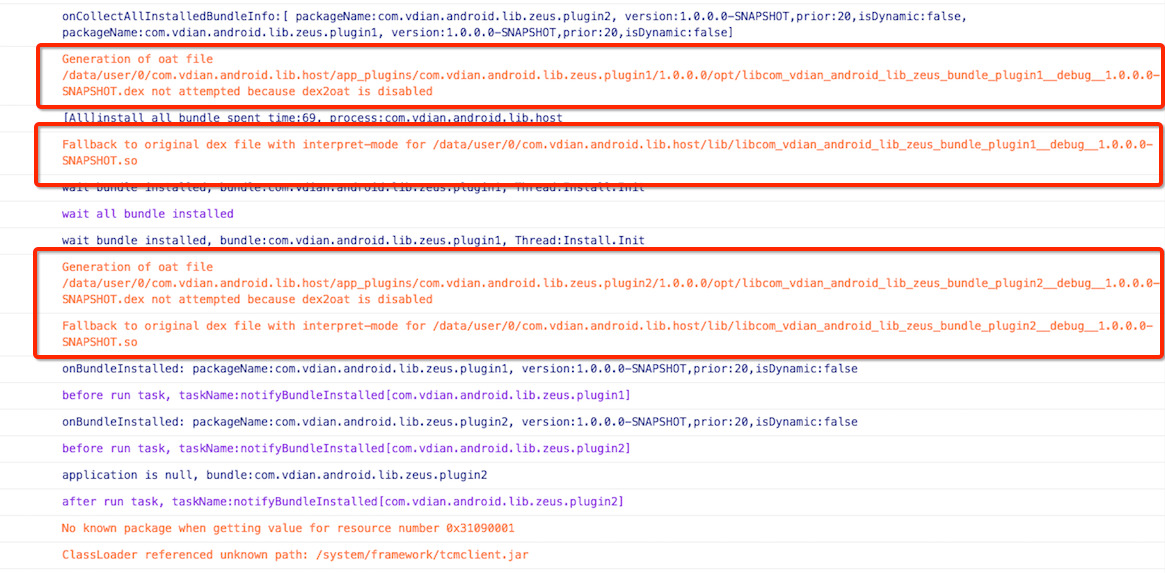
通过在AOSP中查找关键日志 Generation of oat file …. not attempt because dex2oat is disabled 即可继续发现猫腻。最终我们会发现这部分信息出现在了class_linker.cc类或者oat_file_manager.cc类中。
正向源码分析
有了以上基础,我们尝试从源码角度进行正向分析。
在Java层我们加载一个Dex是通过DexFile.loadDex()方法进行加载。此方法最终会走到native方法 openDexFileNative,Android 5.0的源码如下
1 | static jlong DexFile_openDexFileNative(JNIEnv* env, jclass, jstring javaSourceName, jstring javaOutputName, jint) { |
最终会调用到ClassLinker中的OpenDexFilesFromOat方法
对应代码过长,这里不贴了,见
OpenDexFilesFromOat函数主要做了如下几步
- 1、检测我们是否已经有一个打开的oat文件
- 2、如果没有已经打开的oat文件,则从磁盘上检测是否有一个已经生成的oat文件
- 3、如果磁盘上有一个生成的oat文件,则检测该oat文件是否过期了以及是否包含了我们所有的dex文件
- 4、如果以上都不满足,则会重新生成
首次打开时,1-3步必然是不满足的,最终会走到第四个逻辑,这一步有一个关键性的代码直接决定了生成oat文件是否生成成功
1 | if (Runtime::Current()->IsDex2OatEnabled() && has_flock && scoped_flock.HasFile()) { |
核心函数Runtime::Current()->IsDex2OatEnabled(),判断dex2oat是否开启,如果开启,则创建oat文件并进行更新。
以上是Android 5.0的源码,Android 6.0-Android 9.0会有所差异。DexFile_openDexFileNative最终会调用到runtime->GetOatFileManager().OpenDexFilesFromOat(),继续会调用到OatFileAssistant类中的MakeUpToDate函数,一直调用到GenerateOatFile(Androiod 6.0-7.0)或GenerateOatFileNoChecks(Android 8.0-9.0)等类型函数,相关代码见如下链接。
- android-9.0.0_r18/runtime/native/dalvik_system_DexFile.cc#267
- android-9.0.0_r18/runtime/oat_file_manager.cc#394
- android-7.0.0_r1/runtime/oat_file_assistant.cc#206 (Androiod 6.0-7.0)
- android-9.0.0_r18/runtime/oat_file_assistant.cc#251 (Android 8.0-9.0)
最终我们也会发现一段关键性的代码,如下
1 | Runtime* runtime = Runtime::Current(); |
可以看到,我们已经看到了我们逆向日志分析时,从控制台看到的日志内容,Generation of oat file….not attempted because dex2oat is disabled,这说明我们源码找对了。
通过以上分析,我们发现Android 5.0-Android 9.0最终都会走到Runtime::Current()->IsDex2OatEnabled()函数,如果dex2oat没有开启,则不会进行后续oat文件生成的操作,而是直接return返回。所以结论已经很明确了,就是通过设置该函数的返回值为false,达到禁用dex2oat的目的。
通过查看Runtime类的代码,可以发现IsDex2OatEnabled其实很简单,就是返回了一个dex2oat_enabled_成员变量与另一个image_dex2oat_enabled_成员变量。源码见:
1 | bool IsDex2OatEnabled() const { |
因此最终我们的目的就很明确了,只要把成员变量dex2oat_enabled_的值和image_dex2oat_enabled_的值进行修改,将它们修改成false,就达到了直接禁用的目的。如果要重新开启,则重新还原他们的值为true即可,默认情况下,该值始终是true。
不过经过验证后发现手淘Atlas是通过禁用IsImageDex2OatEnabled()达到目的的,即它是通过修改image_dex2oat_enabled_而不是dex2oat_enabled_,这一点在兼容性方面十分重要,在一定程度上保障了部分机型的兼容性(比如一加,8.0之后加入了一个变量,导致数据结构向后偏移1字节;VIVO/OPPO部分机型加入变量,导致数据结构向后偏移1字节),因此为了保持策略上的一致性,我们只修改image_dex2oat_enabled_,不修改dex2oat_enabled_。
原理与实现
有了以上理论基础,我们必须进行实践,用结论验证猜想,才会有说服力了。
上面已经说到我们只需要修改Runtime中image_dex2oat_enabled_成员变量的值,将其对应的image_dex2oat_enabled_变量修改为false即可。
因此第一步我们需要拿到这个Runtime的地址。
在JNI中,每一个Java中的native方法对应的jni函数,都有一个JNIEnv* 指针入参,通过该指针变量的GetJavaVM函数,我们可以拿到一个JavaVM*的指针变量
1 | JavaVM *javaVM; |
而JavaVm在JNI中的数据结构定义为(源码地址见 android-9.0.0_r20/include_jni/jni.h)
1 | typedef _JavaVM JavaVM; |
可以看到,只有一个JNIInvokeInterface*指针变量
而在Android中,实际使用的是JavaVMExt(源码地址见 android-9.0.0_r20/runtime/java_vm_ext.h),它继承了JavaVM,它的数据结构可以简单理解为
1 | class JavaVMExt : public JavaVM { |
根据内存布局,我们可以将JavaVMExt等效定义为
1 | struct JavaVMExt { |
指针类型,在32位上占4字节,在64位上占8字节。
因此我们只需要将我们之前拿到的JavaVM *指针,强制转换为JavaVMExt*指针,通过JavaVMExt*指针拿到Runtime*指针
1 | JavaVM *javaVM; |
剩下的事就非常简单了,我们只需要将Runtime数据结构重新定义一遍,这里值得注意的是Android各版本Runtime数据结构不一致,所以需要进行区分,这里以Android 9.0为例。
1 | /** |
注意,尤其需要注意内部布局中存在对齐问题,即 一、结构体变量中成员的偏移量必须是成员大小的整数倍(0被认为是任何数的整数倍) 二、结构体大小必须是所有成员大小的整数倍。
所以我们必须完整的定义原数据结构,不能存在偏移。否则结构体地址就会错乱。
之后将runtime强制转换为PartialRuntime90*即可
1 | PartialRuntime90 *partialRuntime = (PartialRuntime90 *) runtime; |
拿到PartialRuntime90之后,直接修改该数据结构中的image_dex2oat_enabled_即可完成禁用
1 | partialRuntime->image_dex2oat_enabled_ = false |
不过这整个流程需要注意几个问题,通过兼容性测试报告反馈来看,存在了如下几个问题
1、Android 5.1-Android 9.0兼容性极好
2、Android 5.0存在部分产商自定义该数据结构,加入了成员导致image_dex2oat_enabled_向后偏移4字节,又或是部分产商Android 5.0使用了Android 5.1的数据结构导致。
3、部分x86的PAD运行arm的APP,此种场景十分特殊,因此我们选择无视此种机型,不处理
4、考虑校验性问题,需要使用一个变量校验我们是否寻址正确,进行适当降级操作,我们选择以指令集变量instruction_set_作为参考。它是一个枚举变量,正常取值范围为int 类型 1-7,如果该值不满足,我们选择不处理,避免不必要的crash问题。
5、一旦寻址失败,我们选择使用兜底策略进行重试,直接查找指令集变量instruction_set_偏移值,转换为另一个公共的数据结构类型进行操作
这里贴出Android 5.0-9.0各系统Runtime的数据结构
1 |
|
数据结构转换完成后,我们需要进行简单的校验,只需要找到一个特征进行校验,这里我们校验指令集变量instruction_set_是否取值正确,该值是一个枚举,正常取值范围1-7
1 | /** |
只要该值不在范围内,则认为寻址失败
1 | if (partialInstructionSetRuntime->instruction_set_ <= InstructionSet::kNone || |
寻址失败后,我们通过运行期指令集特征变量进行重试查找
在C++中我们可以通过宏定义,简单获取运行期的指令集
1 |
|
需要注意的是如果是InstructionSet::kArm,我们需要优先将其转为成InstructionSet::kThumb2进行查找。如果C++中的运行期指令集变量查找失败,则我们使用Java层获取的指令集变量进行查找
在Java中我们通过反射可以获取运行期指令集
1 | private static Integer currentInstructionSet = null; |
在C++和JAVA层获取到指令集变量的值后,我们通过该变量的值进行寻址
1 | template<typename T> |
查找到instructionSetOffset的地址偏移后,通过各系统的数据结构,计算出image_dex2oat_enabled_地址偏移即可,这里不再详细说明。
深坑之Xposed
当你觉得一切很美好的时候,一个深坑突然冒了出来,Xposed!由于Xposed运行期对art进行了hook,实际使用的是libxposed_art.so而不是libart.so,并且对应数据结构存在篡改现象,以5.0-6.0篡改的最为恶劣,其项目地址为 https://github.com/rovo89/android_art
- https://github.com/rovo89/android_art/blob/v89-sdk21/runtime/runtime.h
- https://github.com/rovo89/android_art/blob/v89-sdk22/runtime/runtime.h
- https://github.com/rovo89/android_art/blob/v89-sdk23/runtime/runtime.h
- https://github.com/rovo89/android_art/blob/v89-sdk24/runtime/runtime.h
- https://github.com/rovo89/android_art/blob/v89-sdk25/runtime/runtime.h
5.0 runtime.h
1 | bool is_recompiling_; |
5.1 runtime.h
1 | bool is_recompiling_; |
6.0 runtime.h
1 | bool is_zygote_; |
可以看到,在5.0和5.1上,数据结构多了is_recompiling_和is_minimal_framework_,实际image_dex2oat_enabled_存在向后偏移2字节的问题;在6.0上,数据结构多了is_minimal_framework_,实际image_dex2oat_enabled_存在向后偏移1字节的问题;而在Android 7.0及以上,暂时未存在篡改runtime.h的现象。因此可在native层判断是否存在xposed框架,存在则手动校准偏移值。
判断是否存在xposed函数如下
1 | static bool initedXposedInstalled = false; |
然后进行偏移校准,这里也不再细说。
兼容性
做到了如上的几步之后,其实兼容性是相当不错了,通过testin的兼容性测试可以看出,基本已经覆盖常见机型,但是由于testin的兼容性只能覆盖testin上约50%左右的机型,剩余50%机型无法覆盖到,因此我选择了人肉远程真机调试,覆盖剩余50%机型,经过验证后,对testin上99%+的机型都是支持的,且同时支持32位和64位动态库,在兼容性方面,已经远远超越Atlas。
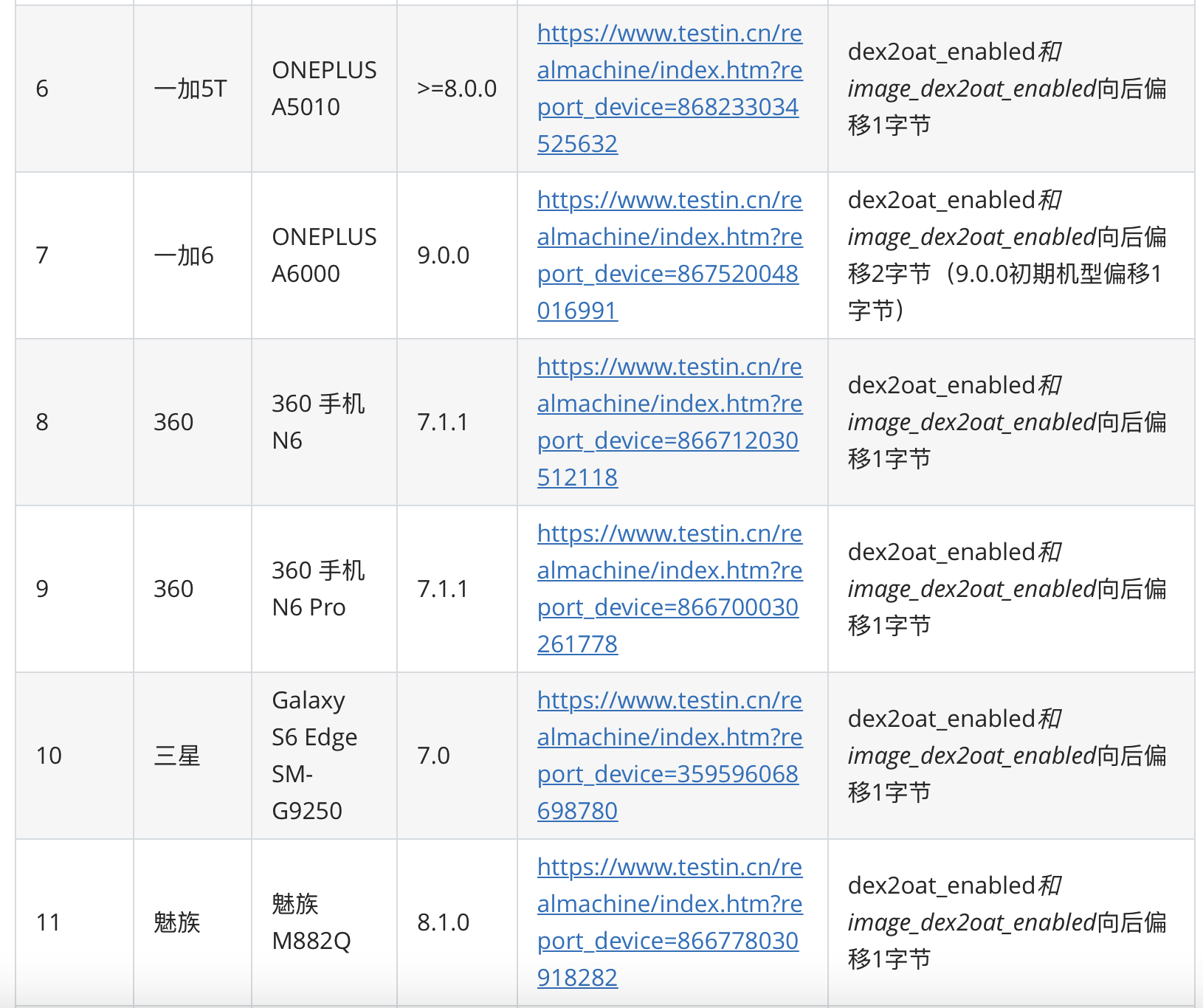
在兼容性测试中,发现一部分机型runtime数据结构存在篡改问题,进一步验证了Atlas为什么修改image_dex2oat_enabled_变量而不是修改dex2oat_enabled_变量,因为dex2oat_enabled_可能存在向后偏移一字节的问题(甚至是2字节,如xposed和一加9.0.2比较新的系统就存在2字节偏移),导致寻址错误,修改的其实是其原来的地址(即现有真实地址的前一个字节),导致禁用失败。而通过修改image_dex2oat_enabled_变量,即使dex2oat_enabled_向后偏移一字节,由于修改的是image_dex2oat_enabled_,所以实际修改的其实就是dex2oat_enabled_现在偏移后的地址,实际上还是达到了禁用的效果。这里有点绕,可以细细品味一下。这个操作,可以兼容大部分机型。
这里贴出一部分数据结构存在偏移的机型。

题外话 Dalvik上dex2opt加速
在art上首次加载插件,会通过禁用dex2oat达到加速效果,那么在dalvik上首次加载插件,其实也存在类似的问题,dalvik上是通过dexopt进行dex的优化操作,这个操作,也是比较耗时的,因此在dalvik上,需要一种类似于dex2oat的方式来达到禁用dex2opt的效果。经过验证后,发现Atlas是通过禁用verify达到一定的加速,因此我们只需要禁用class verify即可。
源码以Android 4.4.4进行分析,见 https://android.googlesource.com/platform/dalvik/+/android-4.4.4_r2/vm/
在Java层我们加载一个Dex是通过DexFile.loadDex()方法进行加载。此方法最终会走到native方法 openDexFileNative,Android 4.4.4的源码如下
最终会调用到dvmRawDexFileOpen或者dvmJarFileOpen
这两个方法,最终都会先查找缓存文件是否存在,如果不存在,最终都会调用到dvmOptimizeDexFile函数,见:
https://android.googlesource.com/platform/dalvik/+/android-4.4.4_r2/vm/analysis/DexPrepare.cpp#351
而dvmOptimizeDexFile函数开头有这么一段逻辑
1 | bool dvmOptimizeDexFile(int fd, off_t dexOffset, long dexLength, |
也就是说gDvm.optimizing的值为true的时候,直接被return了,因此我们只需要修改此值为true,即可达到禁用dexopt的目的,但是当设此值为true时,那所有dexopt操作都会发生IOException,导致类加载失败,存在crash风险,所以不能修改此值,看来只能修改class verify为不校验了,没有其他好的方法。事实证明,去掉这一步校验可以节约至少1倍的时间。
此外发现部分4.2.2和4.4.4存在数据结构偏移问题,可通过几个特征数据结构进行重试,重新定位关键数据结构进行重试。这里我们通过 dexOptMode,classVerifyMode,registerMapMode,executionMode四个特征变量的取值范围进行重试定位,有兴趣自行研究一下,不再细说。
通过查看源码发现gDvm是导出的,见 https://android.googlesource.com/platform/dalvik/+/android-4.4.4_r2/vm/Globals.h#740
1 | extern struct DvmGlobals gDvm; |
因此我们只需要借助dlopen和dlsym拿到整个DvmGlobals数据结构的起始地址,修改对应的变量的值即可。不过不幸的是,Android 4.0-4.4这个数据结构各版本都不大一致,需要判断版本进行适配操作。这里以Android 4.4为例。
首先使用dlopen和dlsym获得对应导出符号表地址
1 | void *dvm_handle = dlopen("libdvm.so", RTLD_LAZY); |
然后直接修改classVerifyMode的值即可
1 | dvmGlobals->classVerifyMode = DexClassVerifyMode::VERIFY_MODE_NONE; |
至此,就完成了dexopt的禁用class verify操作,可以看到,整个逻辑和art上禁用dex2oat十分相似,只需要找到一个变量,修改它即可。
值得注意的是,这里有很多机型,存在部分数据结构向后偏移的问题,因此,这里得通过几个特征数据结构进行定位,从而得到目标数据结构,这里采用的数据结构为
1 | struct DvmGlobalsRetry { |
我们通过变量的范围值,优先找到DexOptimizerMode和DexClassVerifyMode的偏移值,然后从DexClassVerifyMode之后找到RegisterMapMode的偏移值,从RegisterMapMode之后找到ExecutionMode的偏移值,最终得到classVerifyMode的偏移值,经过验证,该方法99%+能得到正确的偏移值,从而进行重试。
部分异常机型数据结构偏移如下

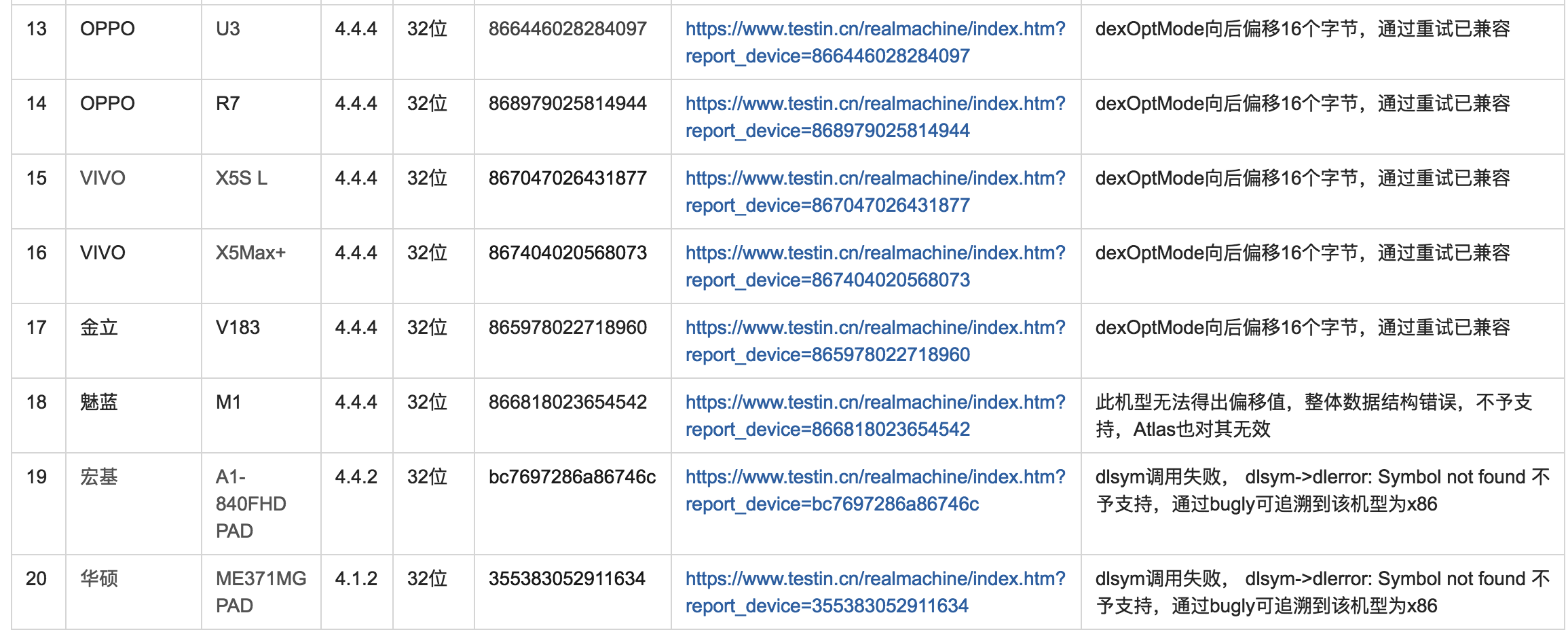
思考:是否AOSP中间某一个版本存在数据结构偏移? 通过查看AOSP源码发现并没有类似偏移,因此不得而知为什么这些Android 4.2.2中dexOptMode向后偏移4字节,Android 4.4.4中dexOptMode向后偏移16字节。偏移值是如此惊人的一致,因此可能的确存在一个git提交,该提交中DvmGlobals数据结构刚好存在如上偏移导致。
Android 4.0-Android 4.4.4,除个别机型偏移值无法计算出来之外,以及dlsym无法获取导出符号表(基本都是X86的PAD),这两种case不予支持,其余testin上4.0-4.4机型全部覆盖,兼容性几乎100%(部分偏移值错误可通过4个特征数据结构进行定位,最终得到正确的偏移值)
总结
至此,完成了art上dex2oat禁用达到加速以及dalvik上dex2opt禁用class verify达到加速,前后从技术方案确定到编码,再到兼容性测试,差不多经历了一个月,花费了大量的精力。完成一件事很简单,但是要把一件事做完美,真的不易。且看且珍惜。
